38 lines
1.7 KiB
Markdown
38 lines
1.7 KiB
Markdown
<<<<<<< HEAD
|
|
# Kinesim
|
|
|
|
Kinesim is a Three.Js based robotics simulator that runs in browser.
|
|
=======
|
|
# robot-gui
|
|
A three.js based 3D robot interface.
|
|
|
|
# How To
|
|
Download or clone. Open `index.html` or [RoboSim](https://aamitn.github.io/rg/). Enjoy 🤖😀
|
|
|
|
You may need to use Chrome, since some ES6 features are not supported in other browsers yet.
|
|
|
|
|
|
|
|
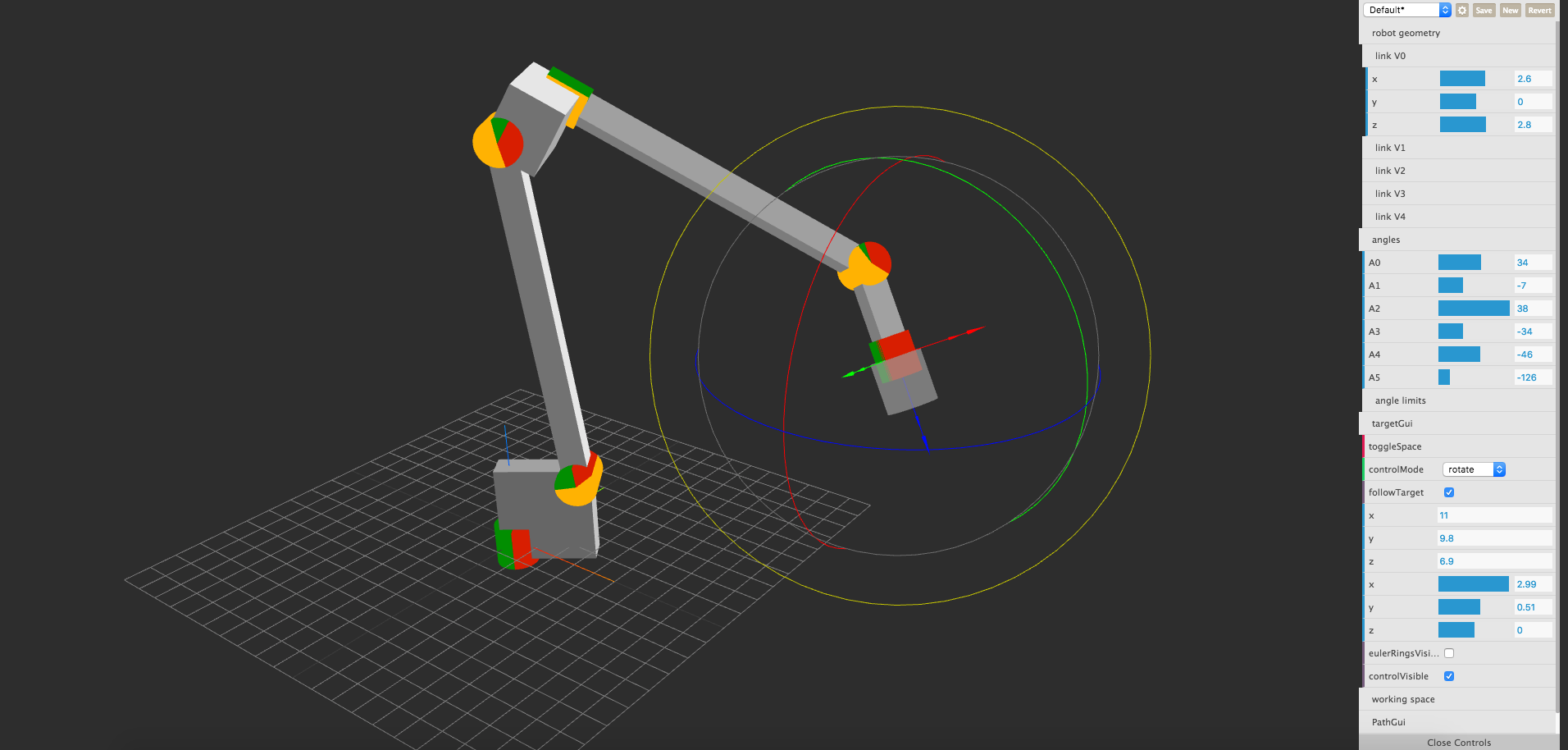
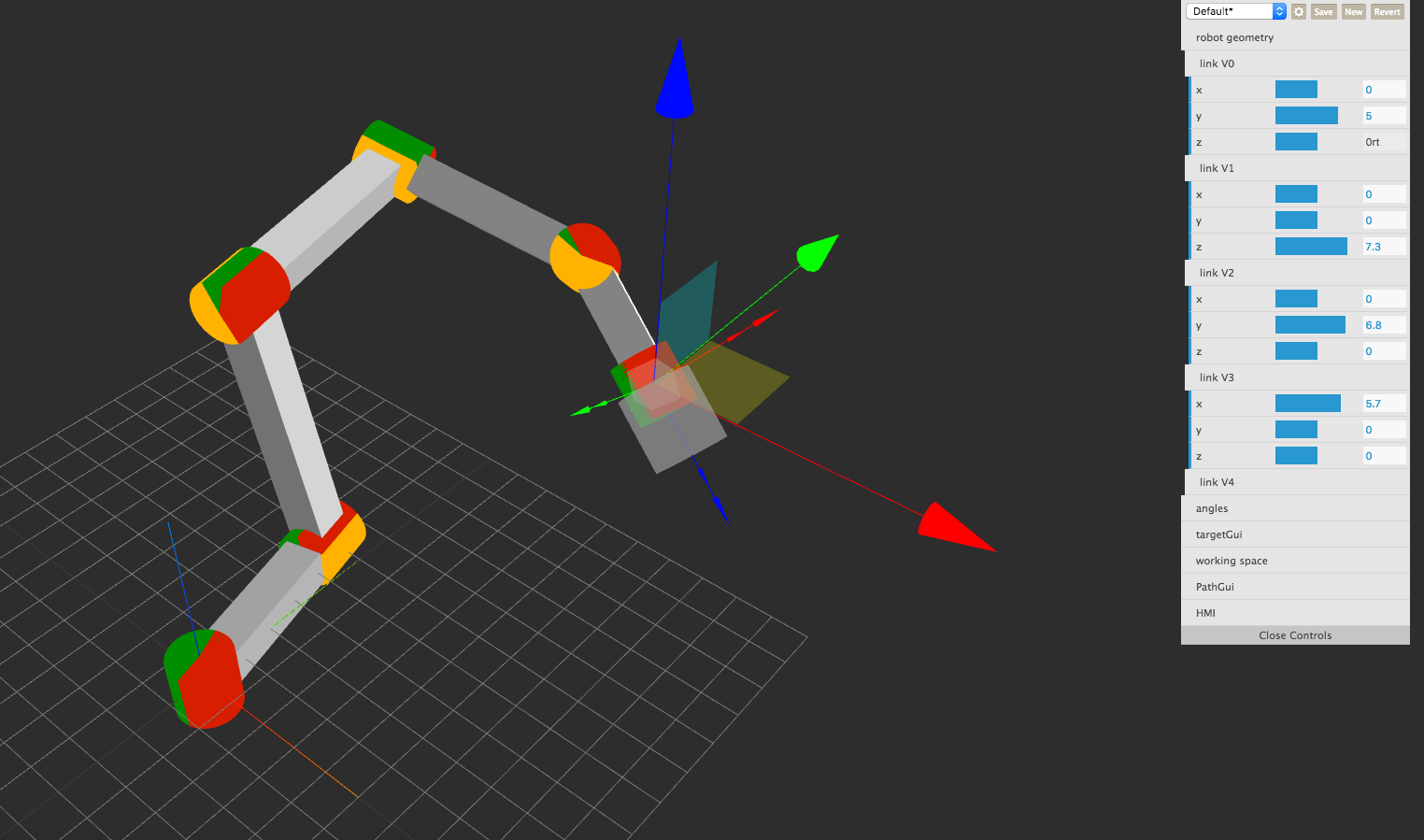
# Geometry
|
|
Configure the robot geometry using the *geometry* tab.
|
|
|
|
|
|
|
|
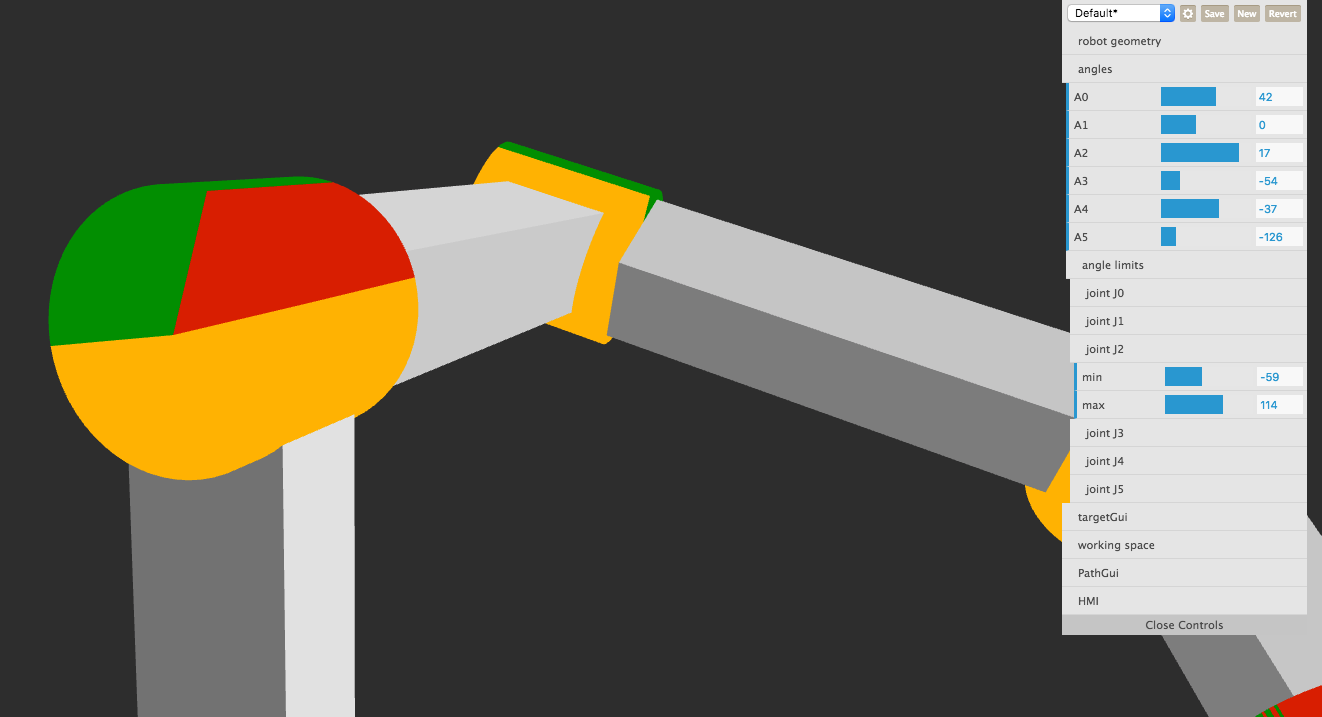
# Angle limits
|
|
Angle limits are shown visualy. *red* negative, *green* positive
|
|
|
|
|
|
|
|
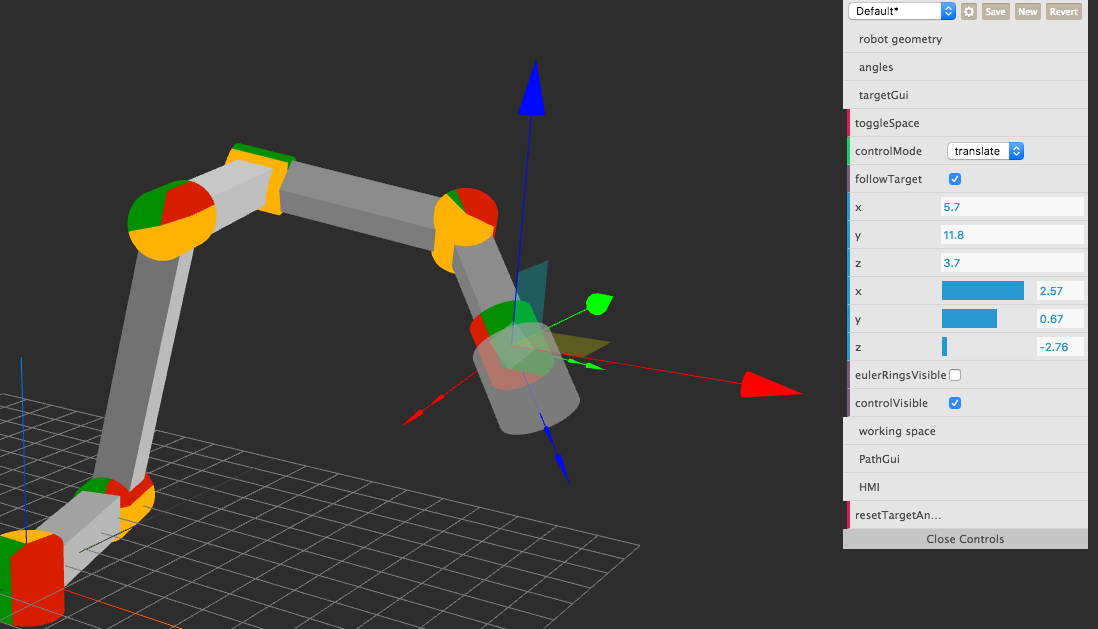
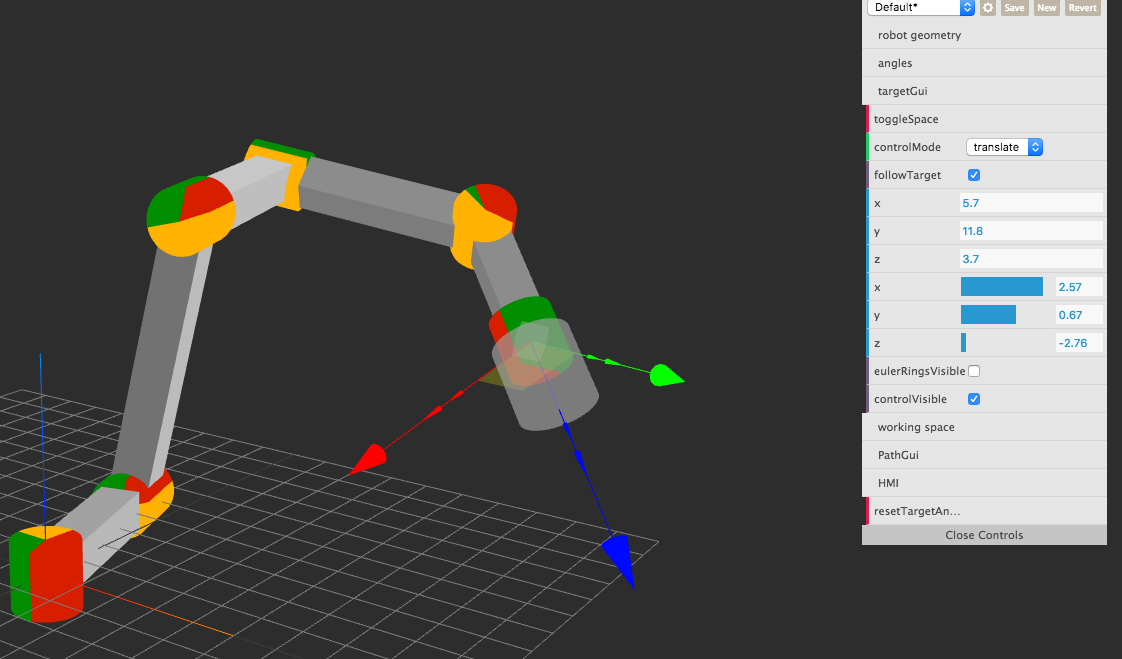
# Toggle Space
|
|
Switch between global and TCP aligned controls
|
|
|
|
|
|
|
|
|
|
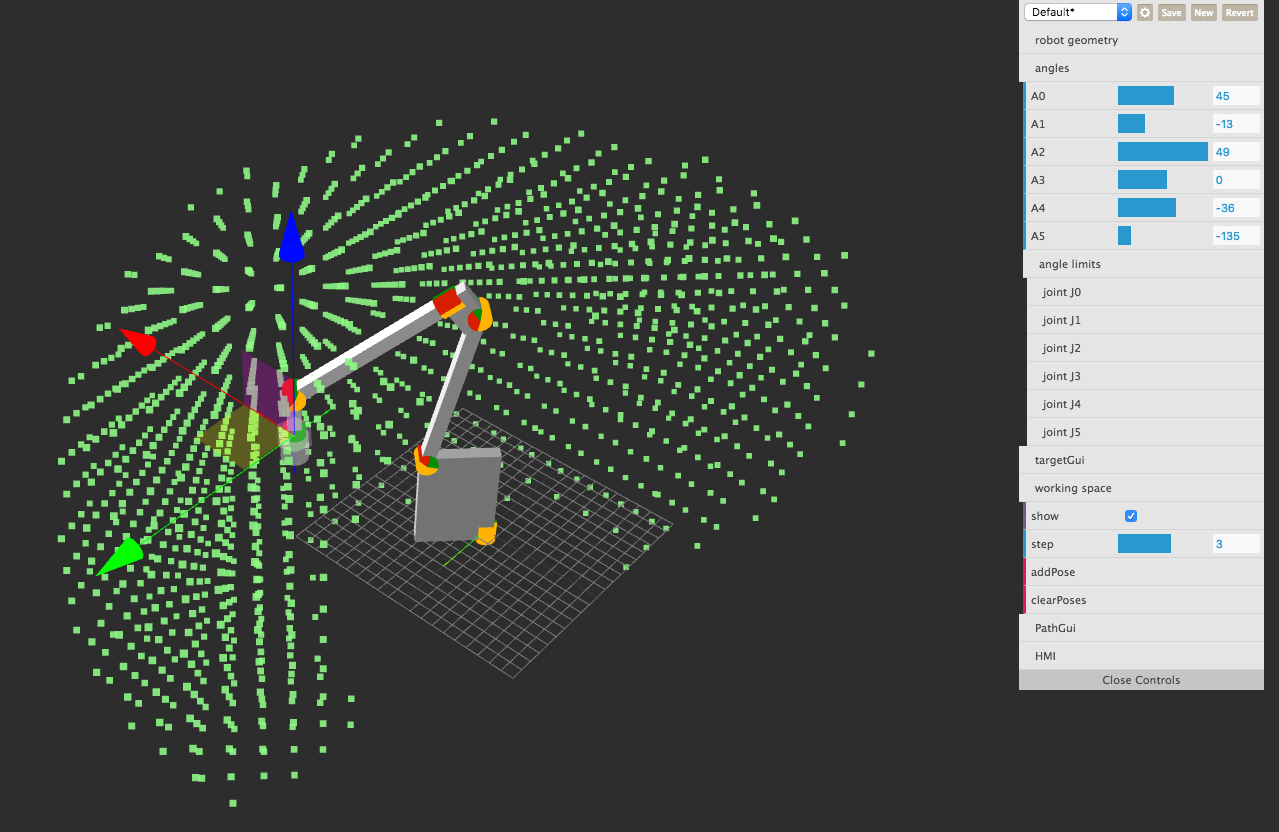
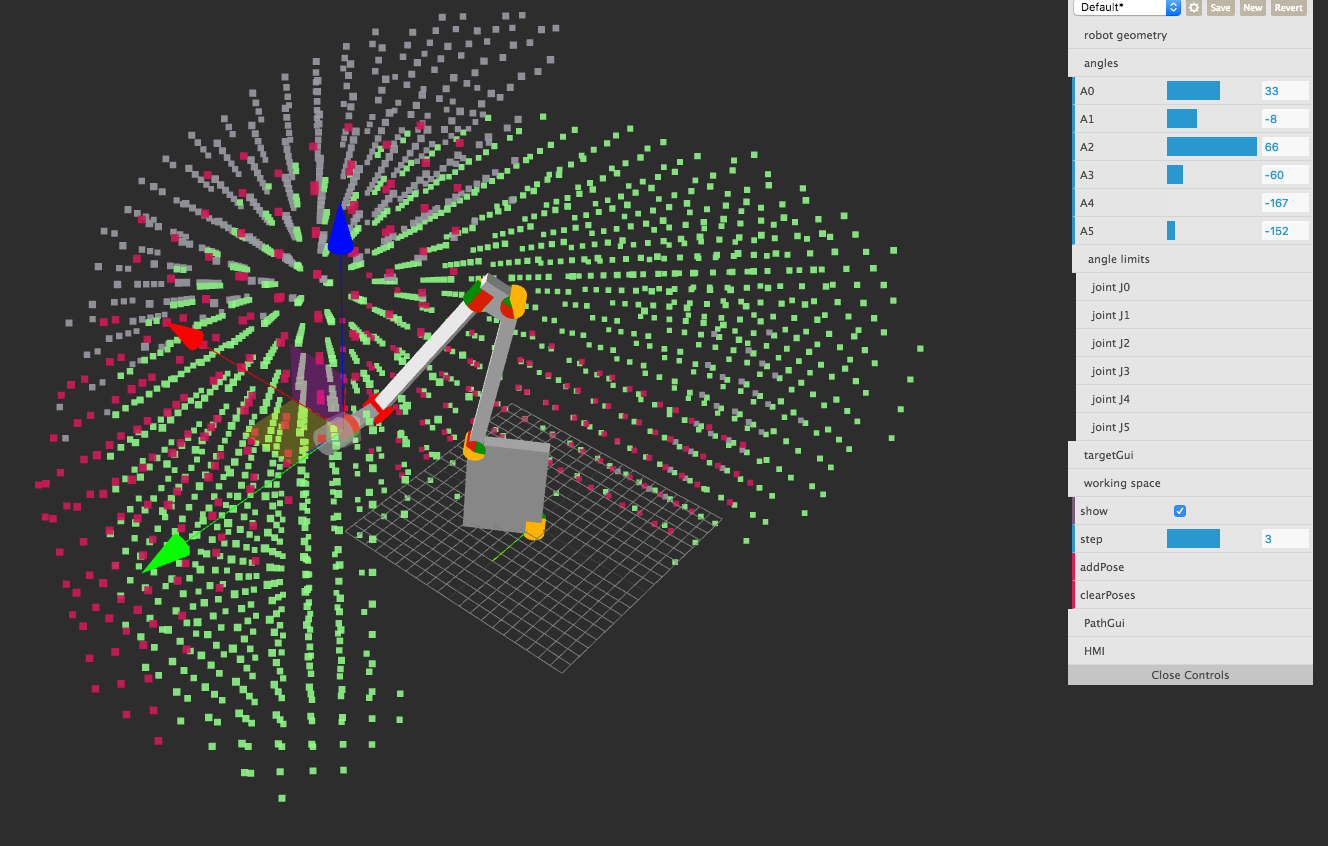
# Working Space
|
|
Click add Pose to visualize the working area for the current TCP orientation. Add muliple poses to compare work area vs orientation.
|
|
|
|
|
|
|
|
|
|
>>>>>>> 244abf3 (Forgejo Up)
|